Build HAT
简介
在 GitHub 上修改
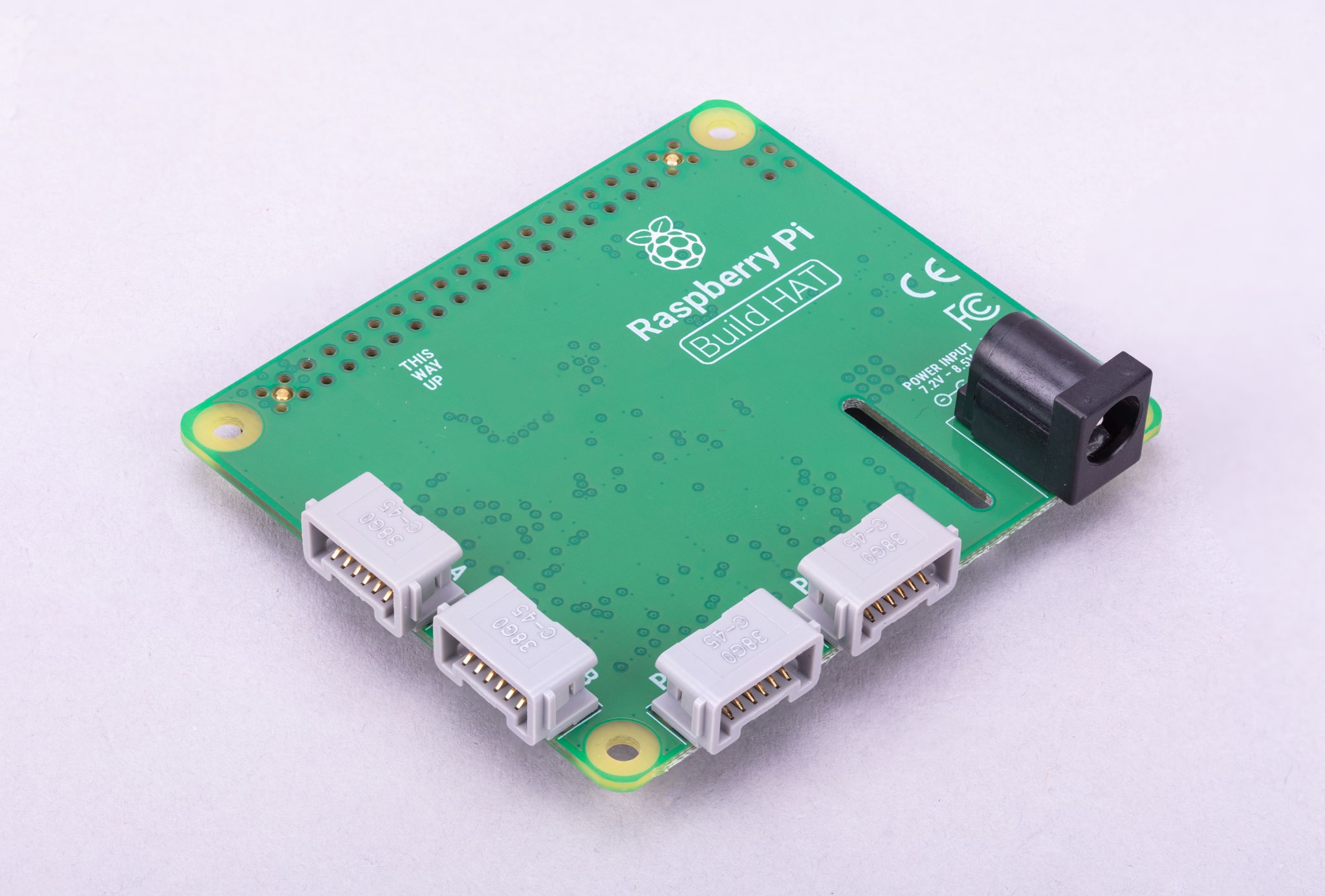
Raspberry Pi Build HAT 是一个附加板,可连接到树莓派的40针GPIO接头,该接头是与乐高®教育合作设计的,可通过树莓派计算机轻松控制乐高®Technic™电机和传感器。
|
Note
|
支持的设备的完整列表可以在 Device Compatibility 部分找到。 |
它为SPIKE™产品组合的乐高®™电机和传感器提供四个连接器。可用的传感器包括距离传感器、颜色传感器和多功能力传感器。角电机有多种尺寸,包括集成编码器,可以查询以找到它们的位置。
Build HAT适用于所有带有40针GPIO接头的Raspberry Pi计算机,包括添加排线或其他键盘系列设备。连接的乐高®Technic™设备可以很容易地用Python控制,以及标准的Raspberry Pi配件,如相机模块。
树莓派Build HAT电源(PSU)是 available separately,旨在为Build HAT和树莓派计算机以及所有连接的乐高®技术™设备供电。

乐高®教育SPIKE™Prime Set 45678和SPIKE™Prime Expansion Set 45681可从乐高®教育经销商处单独获得,包括由Build HAT支持的有用元素集合。
|
Note
|
HAT适用于所有40针GPIO Raspberry Pi板,包括Raspberry Pi Zero系列。通过添加排线或其他扩展设备,它也可以与键盘系列设备一起使用。 |
|
Note
|
Build HAT无法为键盘系列设备供电,因为它不支持通过GPIO标头供电。 |
准备 Build HAT
在 GitHub 上修改
|
Note
|
在开始使用 Raspberry Pi Build HAT 之前,你应该 设置 你的 Raspberry Pi,install 使用 Raspberry Pi Imager 安装最新版本的操作系统。 |
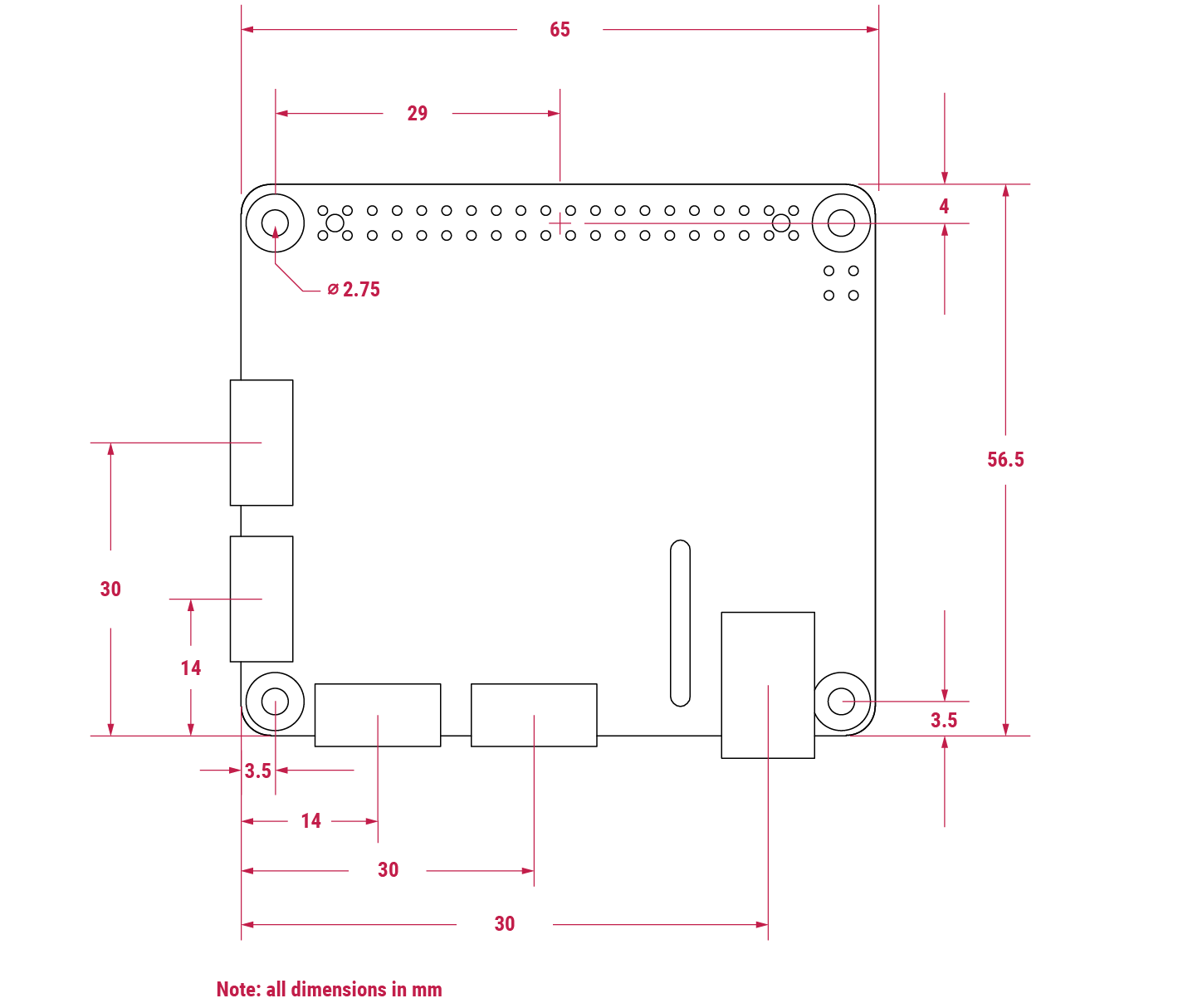
将9毫米垫片连接到板的底部。将Raspberry Pi放在Raspberry Pi上。确保你把它放在正确的位置。与其他HAT不同,所有组件都在底部,为面包板或乐高®元素在顶部留出空间。
连接 GPIO 引脚
如果要访问Raspberry Pi的GPIO引脚,可以添加可选的高接头并使用15 mm垫片。
以下引脚由Build HAT本身使用,您不应该用任何连接它们。
| GPIO | Use | Status |
|---|---|---|
GPIO0/1 |
ID prom |
|
GPIO4 |
Reset |
|
GPIO14 |
Tx |
|
GPIO15 |
Rx |
|
GPIO16 |
RTS |
unused |
GPIO17 |
CTS |
unused |
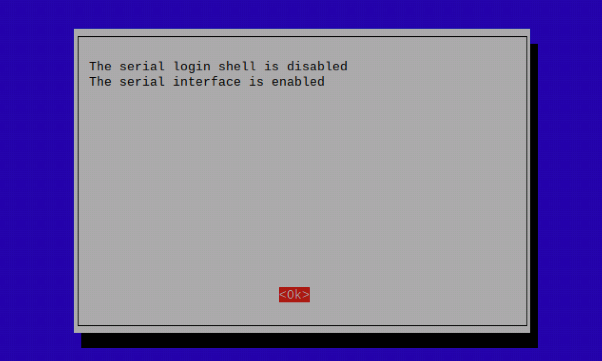
设置Raspberry Pi
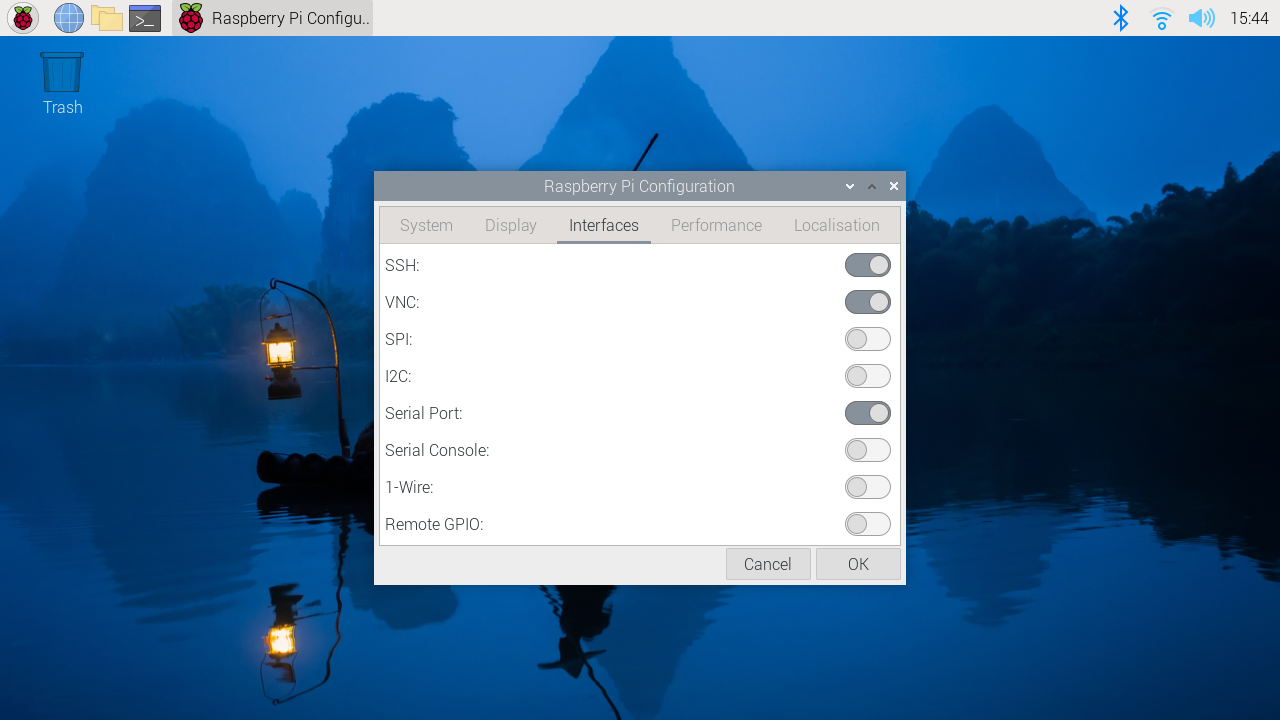
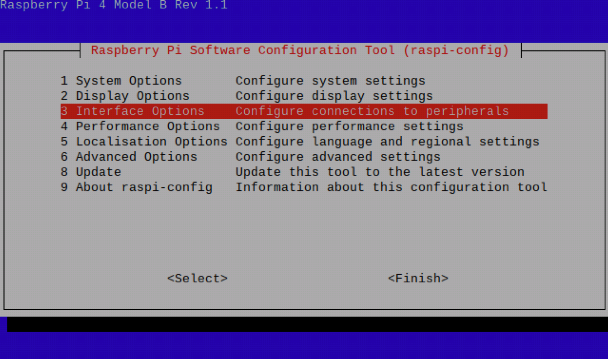
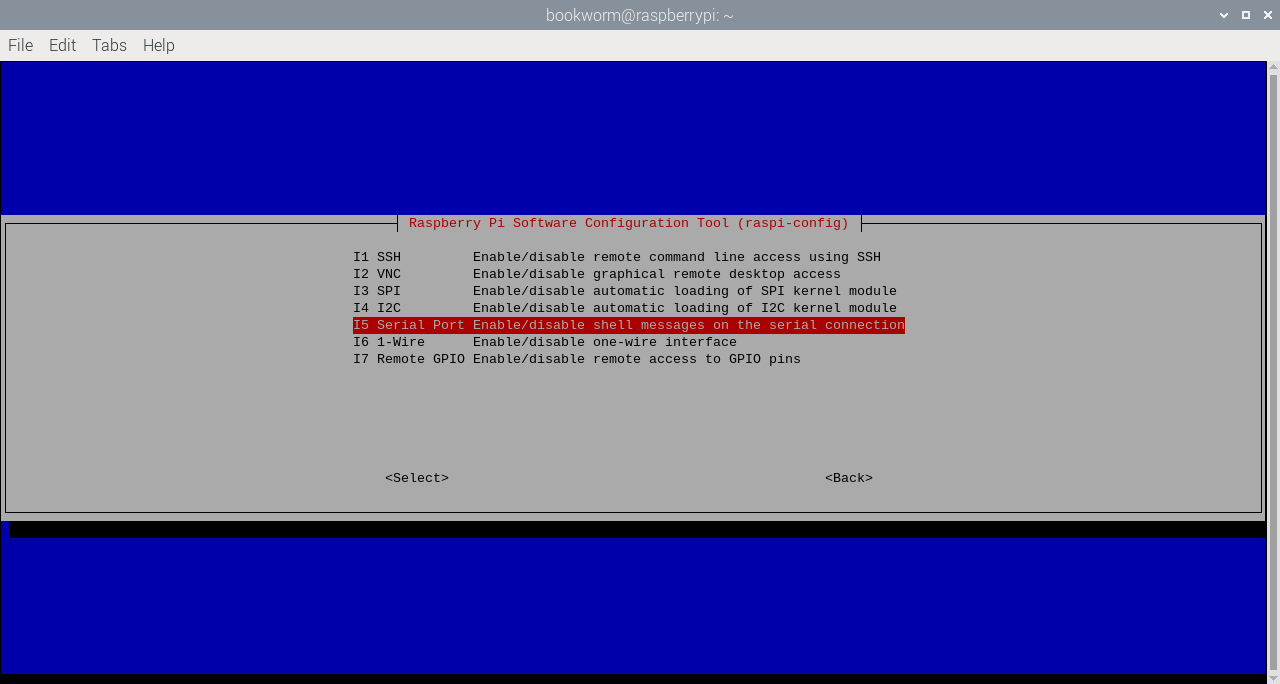
启动Raspberry Pi后,通过单击Raspberry菜单按钮打开Raspberry Pi配置工具,然后选择“首选项(Preferences)”,然后选择“Raspberry Pi配置”。
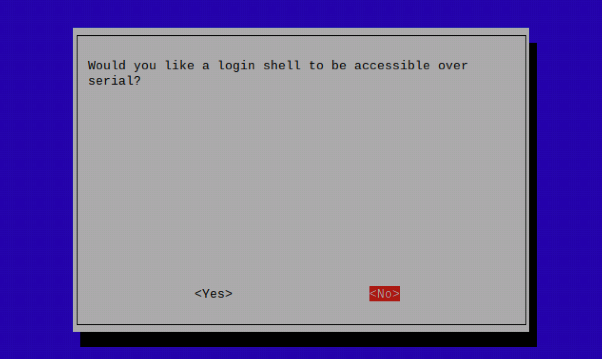
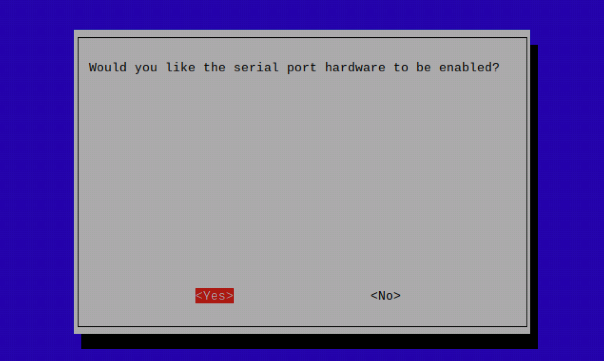
单击“interfaces”选项卡并调整串行设置,如下所示:
Build HAT连接电源
连接外部电源——建议使用 official Raspberry Pi Build HAT power supply——但是任何能够通过DC 5521中心正极筒形连接器(5.5毫米×2.1毫米×11毫米)提供48W的可靠+8V±10%电源都将为Build HAT供电。除非您使用的是键盘系列,否则您也不需要将额外的USB电源连接到Raspberry Pi。
|
Note
|
Build HAT无法为Raspberry Pi 400供电,因为它不支持通过GPIO标头供电。 |
|
Note
|
LEGO® Technic™ 马达的功率非常大,因此需要外部 8V 电源才能驱动它们。如果要读取电机编码器和 SPIKE™ 力传感器的数据,可以通过 Raspberry Pi 的 USB 电源插座,以常规方式为 Raspberry Pi 和 Build HAT 供电。SPIKE™ 颜色和距离传感器与电机一样,需要 外部电源。 |
您可以选择将Build HAT与Python或.NET一起使用。
从 Python 使用 Build HAT
在 GitHub 上修改
安装 Build HAT Python 库
要安装Build HAT Python库,请打开终端窗口并运行以下命令:
$ sudo apt install python3-build-hatBookworm 之前的Raspberry Pi OS版本无法使用 apt 访问库。请运行以下命令以使用 pip 安装库:
$ sudo pip3 install buildhat有关Build HAT Python库的更多信息,请参阅 ReadTheDocs。
使用来自 Python 的电机
在 GitHub 上修改
有 a number of motors 与Build HAT一起使用。
电机工作
启动 Thonny IDE。添加以下程序代码:
from buildhat import Motor
motor_a = Motor('A')
motor_a.run_for_seconds(5)通过单击播放/运行按钮运行程序。如果这是Raspberry Pi启动后第一次运行Build HAT程序,则在将固件烧录到板上时会有几秒钟的暂停。您应该会看到红色LED熄灭,绿色LED亮起。Python程序的后续执行不需要此暂停。
你的马达应该顺时针转5秒钟。
更改程序的最后一行并重新运行。
motor_a.run_for_seconds(5, speed=50)电机现在应该转得更快了。做另一个改变:
motor_a.run_for_seconds(5, speed=-50)电机应向相反(逆时针)方向转动
通过单击Thonny中的加号按钮创建一个新程序。添加下面的代码:
from buildhat import Motor
motor_a = Motor('A')
while True:
print("Position: ", motor_a.get_aposition())运行程序。抓住马达并转动轴。您应该会看到Thonny REPL中打印的数字发生变化。
使用 Python 中的传感器
在 GitHub 上修改
有一个与Build HAT一起使用的 大范围传感器。
使用传感器工作
将颜色传感器连接到Build HAT上的端口B,将力传感器连接到端口C。
|
Note
|
如果您不打算驱动电机,那么您不需要外部电源,您可以为Raspberry Pi使用标准USB电源。 |
创建另一个新程序:
from signal import pause
from buildhat import ForceSensor, ColorSensor
button = ForceSensor('C')
cs = ColorSensor('B')
def handle_pressed(force):
cs.on()
print(cs.get_color())
def handle_released(force):
cs.off()
button.when_pressed = handle_pressed
button.when_released = handle_released
pause()运行它,将一个彩色物体(乐高®元件是理想的)放在颜色传感器前面,按下力传感器柱塞。传感器的发光二极管应该打开,最接近的颜色的名称应该显示在Thonny REPL中。
Use the Build HAT from .NET
在 GitHub 上修改
Install the .NET Framework
在 Raspberry Pi 上无法通过 apt 安装微软的 .NET 框架。不过,您可以按照微软提供的 官方说明安装 .NET 框架。另外,还有一个简化的 第三方途径,可以将 .NET 工具链安装到 Raspberry Pi 上。
|
Warning
|
安装脚本以 root 运行。您应该先阅读它并确保您了解它在做什么。如果您完全不确定,您应该手动遵循 官方说明。
|
$ wget -O - https://raw.githubusercontent.com/pjgpetecodes/dotnet5pi/master/install.sh | sudo bash安装.NET框架后您可以创建您的项目:
$ dotnet new console --name buildhat这会在 buildhat 子目录中创建一个默认程序,我们需要在该目录中才能继续:
$ cd buildhat您现在需要安装以下nuget包:
$ dotnet add package System.Device.Gpio --version 2.1.0
$ dotnet add package Iot.Device.Bindings --version 2.1.0Run C# Code
您可以使用 dotnet run 命令运行程序。让我们现在尝试一下,以确保一切正常。它应该打印“Hello World!”
$ dotnet run
Hello World!(当在随后的说明中指示“运行程序”时,您只需重新运行 dotnet run)
Edit C# Code
在下面的说明中,您将编辑文件 buildhat/Program.cs,即运行上述命令时生成的C#程序。
任何文本编辑器都可以编辑C#代码,包括预装的IDE/文本编辑器Geany。https://code.visualstudio.com/docs/setup/raspberry-pi/[Visual Studio Code](通常称为“VS Code”)也是一种流行的替代方案。
Use the Build HAT from .NET
在 GitHub 上修改
Raspberry Pi Built HAT 在乐高®术语中被称为 “Brick”,您可以使用 Build HAT串行协议通过.NET与它直接对话。
您可以创建一个 brick 对象,如下所示,
Brick brick = new("/dev/serial0");但您需要记住在代码末尾处理 brick。
brick.Dispose();|
Warning
|
如果您不调用 brick.Dispose(),您的程序将不会终止。
|
如果您想避免在最后调用 brick.Dispose,请使用 using 语句创建砖块:
using Brick brick = new("/dev/serial0");在这种情况下,当到达程序结束时,您的砖块将被自动处理。
显示 Build HAT 信息
您可以收集各种软件版本、签名和输入电压:
var info = brick.BuildHatInformation;
Console.WriteLine($"version: {info.Version}, firmware date: {info.FirmwareDate}, signature:");
Console.WriteLine($"{BitConverter.ToString(info.Signature)}");
Console.WriteLine($"Vin = {brick.InputVoltage.Volts} V");|
Note
|
输入电压在启动时只读取一次,之后不会再次读取。 |
获取传感器和电机详细信息
功能 GetSensorType、GetSensor 将允许您检索有关连接传感器的任何信息。
SensorType sensor = brick.GetSensorType((SensorPort)i);
Console.Write($"Port: {i} {(Brick.IsMotor(sensor) ? "Sensor" : "Motor")} type: {sensor} Connected: ");在此示例中,您也可以使用 IsMotor 静态函数来检查连接的元件是传感器还是电机。
if (Brick.IsActiveSensor(sensor))
{
ActiveSensor activeSensor = brick.GetActiveSensor((SensorPort)i);
}
else
{
var passive = (Sensor)brick.GetSensor((SensorPort)i);
Console.WriteLine(passive.IsConnected);
}ActiveSensor 有一个高级属性和功能的集合,允许理解传感器的每个元素。也可以从砖块中调用原始函数。这将允许您选择特定模式并进行高级场景。虽然这是可能的,但电机和传感器类已经创建,让您的生活更轻松。
事件
大多数传感器在其特殊属性上实现事件。您可以简单地订阅 PropertyChanged 和 PropertyUpdated。更改后的值将在值更改时触发,而更新后的值将在属性成功更新时触发。根据使用的模式,一些属性可能一直在后台更新,而另一些属性偶尔会更新。
只有当颜色发生变化或电机位置发生变化时,您才会感兴趣,将其用作转速计。在这种情况下,PropertyChanged 就是您需要的!
Console.WriteLine("Move motor on Port A to more than position 100 to stop this test.");
brick.WaitForSensorToConnect(SensorPort.PortA);
var active = (ActiveMotor)brick.GetMotor(SensorPort.PortA);
bool continueToRun = true;
active.PropertyChanged += MotorPropertyEvent;
while (continueToRun)
{
Thread.Sleep(50);
}
active.PropertyChanged -= MotorPropertyEvent;
Console.WriteLine($"Current position: {active.Position}, eventing stopped.");
void MotorPropertyEvent(object? sender, PropertyChangedEventArgs e)
{
Console.WriteLine($"Property changed: {e.PropertyName}");
if (e.PropertyName == nameof(ActiveMotor.Position))
{
if (((ActiveMotor)brick.GetMotor(SensorPort.PortA)).Position > 100)
{
continueToRun = false;
}
}
}Use Motors from .NET
在 GitHub 上修改
有两种类型的电机,*被动*的和*主动*的。主动电机将提供详细的位置,绝对位置和速度,而被动电机只能控制速度。
可以使用一组通用的功能来控制电机的速度。有两个重要的:SetPowerLimit 和 SetBias:
train.SetPowerLimit(1.0);
train.SetBias(0.2);可接受的值仅为0.0到1.0。功率限制是按比例降低最大功率的方便方法。
偏置值设置为电流端口,它被添加到正电机驱动值中,并从负电机驱动值中减去。这可以用来补偿大多数直流电机在转动之前需要一定的驱动量的事实。
创建电机时的默认值为功率限制0.7,偏置0.3。
无源电机

典型的无源电机是火车和较旧的加电电机。Speed 属性可以设置和读取。它是目标和测量速度,同时这些传感器没有办法测量它们。值从-100到+100。
还提供控制 Start、Stop 和 SetSpeed 的功能。以下是如何使用它的示例:
Console.WriteLine("This will run the motor for 20 secondes incrementing the PWM");
train.SetPowerLimit(1.0);
train.Start();
for (int i = 0; i < 100; i++)
{
train.SetSpeed(i);
Thread.Sleep(250);
}
Console.WriteLine("Stop the train for 2 seconds");
train.Stop();
Thread.Sleep(2000);
Console.WriteLine("Full speed backward for 2 seconds");
train.Start(-100);
Thread.Sleep(2000);
Console.WriteLine("Full speed forward for 2 seconds");
train.Start(100);
Thread.Sleep(2000);
Console.WriteLine("Stop the train");
train.Stop();|
Note
|
列车启动后,您可以调整速度,电机将相应调整。 |
主动电机

有源电机具有 Speed、AbsolutePosition、Position 和 TargetSpeed 等特殊性能。即使电机停止,它们也会连续读取。
代码片段展示了如何获取电机、启动它们并读取属性:
brick.WaitForSensorToConnect(SensorPort.PortA);
brick.WaitForSensorToConnect(SensorPort.PortD);
var active = (ActiveMotor)brick.GetMotor(SensorPort.PortA);
var active2 = (ActiveMotor)brick.GetMotor(SensorPort.PortD);
active.Start(50);
active2.Start(50);
// Make sure you have an active motor plug in the port A and D
while (!Console.KeyAvailable)
{
Console.CursorTop = 1;
Console.CursorLeft = 0;
Console.WriteLine($"Absolute: {active.AbsolutePosition} ");
Console.WriteLine($"Position: {active.Position} ");
Console.WriteLine($"Speed: {active.Speed} ");
Console.WriteLine();
Console.WriteLine($"Absolute: {active2.AbsolutePosition} ");
Console.WriteLine($"Position: {active2.Position} ");
Console.WriteLine($"Speed: {active2.Speed} ");
}
active.Stop();
active2.Stop();|
Note
|
不要忘记在需要时启动和停止电机。 |
主动电机可使用高级功能。您可以请求移动几秒钟,移动到特定位置,特定的绝对位置。这里有几个例子:
// From the previous example, this will turn the motors back to their initial position:
active.TargetSpeed = 100;
active2.TargetSpeed = 100;
// First this motor and will block the thread
active.MoveToPosition(0, true);
// Then this one and will also block the thread
active2.MoveToPosition(0, true);每个函数都允许您在执行操作的时间内阻塞或不阻塞线程。请注意,对于绝对和相对位置移动,有几度的容差。
brick.WaitForSensorToConnect(SensorPort.PortA);
var active = (ActiveMotor)brick.GetMotor(SensorPort.PortA);
active.TargetSpeed = 70;
Console.WriteLine("Moving motor to position 0");
active.MoveToPosition(0, true);
Console.WriteLine("Moving motor to position 3600 (10 turns)");
active.MoveToPosition(3600, true);
Console.WriteLine("Moving motor to position -3600 (so 20 turns the other way");
active.MoveToPosition(-3600, true);
Console.WriteLine("Moving motor to absolute position 0, should rotate by 90°");
active.MoveToAbsolutePosition(0, PositionWay.Shortest, true);
Console.WriteLine("Moving motor to position 90");
active.MoveToAbsolutePosition(90, PositionWay.Shortest, true);
Console.WriteLine("Moving motor to position 179");
active.MoveToAbsolutePosition(179, PositionWay.Shortest, true);
Console.WriteLine("Moving motor to position -180");
active.MoveToAbsolutePosition(-180, PositionWay.Shortest, true);
active.Float();您可以将电机置于浮动位置,这意味着它不再受约束。在将电机用作转速计、移动电机并读取位置时,可以使用这种模式。如果电机上仍有约束,则可能无法移动。
Use Sensors from .NET
在 GitHub 上修改
就像电机一样,您有主动和被动传感器。最近的传感器是主动的。被动的是灯和简单的按钮。主动的是距离或颜色传感器,以及小型3×3像素显示器。
Button/Touch Passive Sensor
按钮/触摸无源传感器有一个特定属性 IsPressed。按下按钮时,该属性设置为true。这是一个完整的事件示例:
brick.WaitForSensorToConnect(SensorPort.PortA);
var button = (ButtonSensor)brick.GetSensor(SensorPort.PortA);
bool continueToRun = true;
button.PropertyChanged += ButtonPropertyEvent;
while (continueToRun)
{
// You can do many other things here
Thread.Sleep(50);
}
button.PropertyChanged -= ButtonPropertyEvent;
Console.WriteLine($"Button has been pressed, we're stopping the program.");
brick.Dispose();
void ButtonPropertyEvent(object? sender, PropertyChangedEventArgs e)
{
Console.WriteLine($"Property changed: {e.PropertyName}");
if (e.PropertyName == nameof(ButtonSensor.IsPressed))
{
continueToRun = false;
}
}被动光源

被动光源是火车灯。它们可以打开,你可以控制它们的亮度。
brick.WaitForSensorToConnect(SensorPort.PortA);
var light = (PassiveLight)brick.GetSensor(SensorPort.PortA);
// Brightness 50%
light.On(50);
Thread.Sleep(2000);
// 70% Brightness
light.Brightness = 70;
Thread.Sleep(2000);
// Switch light off
light.Off()主动传感器
有源传感器类是所有有源传感器继承的通用类,包括有源电机。它们包含一组关于它们如何连接到Build HAT、模式、详细的Combi模式、硬件、软件版本和一个名为 ValueAsString 的特定属性的属性。字符串形式的值包含作为字符串集合的最后一个测量值。测量值像 P0C0: +23 -42 0 一样到达,枚举将包含 P0C0:、+23、-42 和 0。这是这样做的,所以如果你使用高级模式并管理自己的Combi模式和命令,你将能够获得测量值。
所有活动传感器都可以运行特定的测量模式或Combi模式。您可以使用 SelectModeAndRead 和 SelectCombiModesAndRead 功能通过高级模式设置一个,并使用您希望持续使用的特定模式。重要的是要了解更改模式或设置新模式将停止以前的模式。
CombiModes 属性中列出了可以在Combi模式中组合的模式。当您设置其中一种模式时,传感器的属性将自动更新。
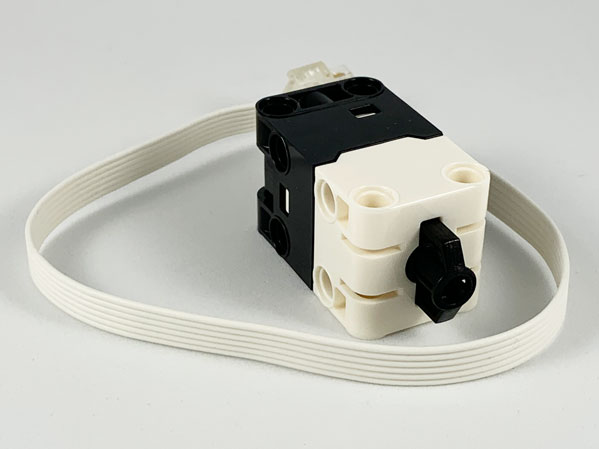
WeDo 倾斜传感器
WeDo倾斜传感器具有特殊的 Tilt 属性。类型是一个点,X是X倾斜,Y是Y倾斜。值从-45到+45,它们被限制为这些值并表示度数。
您可以使用 ContinuousMeasurement 属性设置此传感器的连续测量。
brick.WaitForSensorToConnect(SensorPort.PortA);
var tilt = (WeDoTiltSensor)brick.GetSensor(SensorPort.PortA);
tilt.ContinuousMeasurement = true;
Point tiltValue;
while(!console.KeyAvailable)
{
tiltValue = tilt.Tilt;
console.WriteLine($"Tilt X: {tiltValue.X}, Tilt Y: {tiltValue.Y}");
Thread.Sleep(200);
}WeDoDistance 传感器

WeDo距离传感器通过距离属性为您提供以毫米为单位的距离。
brick.WaitForSensorToConnect(SensorPort.PortA);
var distance = (WeDoDistanceSensor)brick.GetSensor(SensorPort.PortA);
distance.ContinuousMeasurement = true;
while(!console.KeyAvailable)
{
console.WriteLine($"Distance: {distance.Distance} mm");
Thread.Sleep(200);
}SPIKE Prime 力传感器
该力传感器测量施加在其上的压力以及是否被按压。可以通过 Force 和 IsPressed 属性访问这两个属性。
brick.WaitForSensorToConnect(SensorPort.PortA);
var force = (ForceSensor)brick.GetSensor(SensorPort.PortA);
force.ContinuousMeasurement = true;
while(!force.IsPressed)
{
console.WriteLine($"Force: {force.Force} N");
Thread.Sleep(200);
}SPIKE Essential 3×3 Colour Light Matrix

这是一个小型3×3显示器,带有9个不同的LED,可以单独控制。该类公开了能够控制屏幕的功能。以下是使用它们的示例:
brick.WaitForSensorToConnect(SensorPort.PortA);
var matrix = (ColorLightMatrix)brick.GetSensor(SensorPort.PortA);
for(byte i = 0; i < 10; i++)
{
// Will light every led one after the other like a progress bar
matrix.DisplayProgressBar(i);
Thread.Sleep(1000);
}
for(byte i = 0; i < 11; i++)
{
// Will display the matrix with the same color and go through all of them
matrix.DisplayColor((LedColor)i);
Thread.Sleep(1000);
}
Span<byte> brg = stackalloc byte[9] { 1, 2, 3, 4, 5, 6, 7, 8, 9 };
Span<LedColor> col = stackalloc LedColor[9] { LedColor.White, LedColor.White, LedColor.White,
LedColor.White, LedColor.White, LedColor.White, LedColor.White, LedColor.White, LedColor.White };
// Shades of grey
matrix.DisplayColorPerPixel(brg, col);SPIKE Prime 颜色传感器和颜色与距离传感器
SPIKE颜色传感器:

颜色和距离传感器:

这些颜色传感器具有多种特性和功能。您可以获得 Color、ReflectedLight 和 AmbiantLight。
除此之外,颜色和距离传感器可以测量 Distance 并有一个物体 Counter。它将自动计算进出范围的物体数量。这确实允许计算从传感器前面经过的物体。距离限制在0到10厘米之间。
brick.WaitForSensorToConnect(SensorPort.PortC);
var colorSensor = (ColorAndDistanceSensor)brick.GetActiveSensor(SensorPort.PortC);
while (!Console.KeyAvailable)
{
var colorRead = colorSensor.GetColor();
Console.WriteLine($"Color: {colorRead}");
var reflected = colorSensor.GetReflectedLight();
Console.WriteLine($"Reflected: {reflected}");
var ambiant = colorSensor.GetAmbiantLight();
Console.WriteLine($"Ambiant: {ambiant}");
var distance = colorSensor.GetDistance();
Console.WriteLine($"Distance: {distance}");
var counter = colorSensor.GetCounter();
Console.WriteLine($"Counter: {counter}");
Thread.Sleep(200);
}|
Note
|
为了更好的测量,不建议以非常快速的方式更改测量模式,颜色集成可能无法以正确的方式完成。这个例子为您提供了使用传感器可以做什么的全部光谱。此外,这个类不实现连续测量模式。您可以使用 SelectModeAndRead 功能通过高级模式设置一个,并使用您想要的特定模式。重要的是要理解更改模式或设置新模式将停止以前的模式。
|
SPIKE Prime 超声波距离传感器

这是一个距离传感器,它确实实现了一个 Distance 属性,该属性将以毫米为单位给出距离。ContinuousMeasurement 模式也可用在这个上。
brick.WaitForSensorToConnect(SensorPort.PortA);
var distance = (UltrasonicDistanceSensor)brick.GetSensor(SensorPort.PortA);
distance.ContinuousMeasurement = true;
while(!console.KeyAvailable)
{
console.WriteLine($"Distance: {distance.Distance} mm");
Thread.Sleep(200);
}更多资料
在 GitHub 上修改
你可以从下面链接下载文档,
Python Library 文档的完整详细信息也可以在 ReadTheDocs上找到。您可以在 .NET IoT Github 存储库中找到有关 .NET 库的更多信息。
您还可以关注树莓派基金会的项目,
设备兼容性
在 GitHub 上修改
Build HAT 库支持SPIKE™产品组合中包含的所有乐高®技术™设备,以及乐高®头脑风暴机器人发明家套件和其他使用PoweredUp连接器的设备。
|
Important
|
包含Maker Plate的SPIKE™Prime扩展套件的产品代码为45681。原始扩展套件为45680,不包括Maker Plate。 |
| 描述 | 颜色 | 乐高产品编号 | FW 支持 | Python 支持 | Alt 编号 | BrickLink | 可用编号 | 套装编号 | 类别 | 类型 | 设备 ID |
|---|---|---|---|---|---|---|---|---|---|---|---|
Large Angular Motor |
White/Cyan |
45602 |
Yes |
Yes |
45602 |
SPIKE Prime Set, SPIKE Prime Expansion Set |
45678, 45680 |
Motor |
Active |
31 |
|
Medium Angular Motor |
White/Cyan |
45603 |
Yes |
Yes |
45603 |
SPIKE Prime Set |
45678 |
Motor |
Active |
30 |
|
Medium Angular Motor |
White/Grey |
6299646, 6359216, 6386708 |
Yes |
Yes |
436655 |
Mindstorms Robot Inventor |
51515 |
Motor |
Active |
4B |
|
Small Angular Motor |
White/Cyan |
45607, 6296520 |
Yes |
Yes |
SPIKE Essentials Set |
Motor |
Active |
41 |
|||
Light/Colour sensor |
White/Black |
6217705 |
Yes |
Yes |
SPIKE Prime Set, SPIKE Prime Expansion Set, Mindstorms Robot Inventor, SPIKE Essentials |
45678, 45680, 51515 |
ColorSensor |
Active |
3D |
||
Distance Sensor |
White/Black |
6302968 |
Yes |
Yes |
SPIKE Prime Set, Mindstorms Robot Inventor |
45678, 51515 |
DistanceSensor |
Active |
3E |
||
System medium motor |
White/Grey |
45303, 6138854, 6290182, 6127110 |
Yes |
Yes |
Wedo 2.0, LEGO Ideas Piano, App controlled Batmobile |
76112 |
Passive |
1 |
|||
Force Sensor |
White/Black |
6254354 |
Yes |
Yes |
45606 |
SPIKE Prime Set |
45678 |
ForceSensor |
Active |
3F |
|
3×3 LED |
White/Cyan |
45608, 6297023 |
Yes |
Yes |
SPIKE Essentials |
Matrix |
Active |
40 |
|||
System train motor |
Black |
88011 |
Yes |
Yes |
28740, 88011-1 |
Cargo Train, Disney Train and Station, Passenger Train |
Passive |
2 |
|||
PoweredUp LED lights |
Black |
88005 |
Yes |
Passive |
8 |
||||||
Medium linear motor |
White/Grey |
88008 |
Yes |
Yes |
26913, 88008-1 |
Boost, Droid Commander |
Motor |
Active |
26 |
||
Technic large motor |
Grey/Grey |
88013 |
Yes |
Yes |
22169 |
Active |
2E |
||||
Technic XL motor |
Grey/Grey |
88014 |
Yes |
Yes |
22172, 88014 |
Active |
2F |
||||
Colour + distance sensor |
White/Grey |
88007 |
Partial |
? |
26912 |
Active |
25 |
||||
WeDo 2.0 Motion sensor |
White/Grey |
45304, 6138855 |
5003423-1 |
Active |
35 |
||||||
WeDo 2.0 Tilt sensor |
White/Grey |
45305, 6138856 |
5003423-1 |
Active |
34 |